From Bin to Machine Autonomously

Robots have historically been too complex for majority of manufacturers – often requiring significant investments, cages as well as specialized expertise. Unfortunately, this meant mom and pop operations and job shops were prohibited from using robotics as a tool in their business. “Our focus has always been on enabling any size company to take advantage of this kind of this kind of capability,” says Jim Lawton, vice president of product and applications management at Universal Robots (UR).
Machine tending has always been one of the mainstay applications for UR’s collaborative robot arms. However, the complexity of automated bin picking has remained a well-known challenge. Accomplishing it with a robot required time, money and expertise designing specialized fixtures and completing extensive programming to effectively integrate it into daily operations.
Today, most bin picking products focus entirely on the vision aspect of bin picking and often require hundreds of lines of programming to bridge the gap from pick to place, especially placement requires accurately inserting the part into a fixture for further processing. UR’s ActiNav Autonomous Bin Picking changes all that, allowing manufacturers with limited or no bin picking deployment expertise to quickly achieve high machine uptime and accurate part placement with few operator interventions. “We are addressing all the complex issues of motion planning, vision, various bin sizes, and different shaped parts with an easy to use solution,” says Lawton.
ActiNav combines real-time autonomous motion control, collaborative robotics, vision and sensor systems in one easy to use, fast to deploy and cost-effective kit. The system requires no vision or robotic programming expertise, but is instead based on a “teach-by-demonstration” principle using a six-step, wizard-guided setup process integrated into the UR cobot teach pendant. ActiNav can be easily and quickly deployed by manufacturers’ in-house automation teams or through assistance from a UR distributor or integrator to deliver increased productivity, quality and efficiency.
Lawton tells IndustryWeek, what ActiNav accomplishes is very significantly different from a pick and drop situation. “It is accurate part placement. If you think about putting a piece of metal into the machine if it's a little off, because it's not firmly seated into the back end, it will result in quality problems,” he says. “We can handle specifically targeted applications where the precision of the placement is important.”
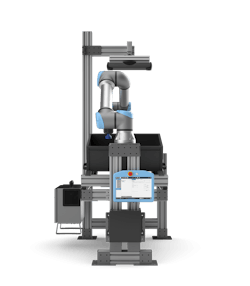
ActiNav works with UR’s UR5e and UR10e e-Series cobots, a user-defined end effector, and application-specific frame or fixture as needed. The kit includes the ActiNav software and Autonomous Motion Module (AMM) controller and URCap user interface software, along with a choice of 3D sensors. Like other UR+ application kits, ActiNav is developed with in-depth application knowledge that eliminates the duplication of engineering efforts when deploying widely used applications.
While there are a variety of approaches to automating machine tending stations, many of which include implementing trays, bowl feeders or conveyors to get the parts to the machine, Lawton explains how ActiNav bypasses this step. “Parts are often already in bins, so the most flexible and scalable option is to deliver that bin of parts to the machine and then pick them directly from the bin and place them into the machine,” he says. “This minimizes floor space and reduces the need for part-specific tooling.”
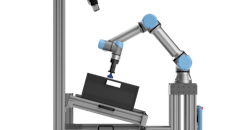
ActiNav autonomously inserts parts into CNC or processing machines such as drilling, deburring, welding, trimming or tapping. The high-resolution 3D sensor and CAD matching enables high-accuracy picks powered by ActiNav’s Autonomous Motion Module (AMM) that determines how to pick the part, then controls the robot to pick the part and place it in a fixture each time. The autonomous motion control enables ActiNav to operate inside deep bins that hold more parts; something that standalone bin picking vision systems struggle to accomplish. When the bin gets low on parts, the system notifies workers by an alert light that it’s ready for more parts.
“The goal is to reduce complexity, make it lower risk, while allowing everybody to deploy a robot even when they have parts in a bin,” says Lawton.
About the Author
Peter Fretty
Technology Editor
As a highly experienced journalist, Peter Fretty regularly covers advances in manufacturing, information technology, and software. He has written thousands of feature articles, cover stories, and white papers for an assortment of trade journals, business publications, and consumer magazines.